


It’s been quiet on the multicore parallelization front for a while. We looked at one example a couple times several years ago: Vector Fabrics*. We looked at the overall problem of extracting parallelism and then some advances in Vector Fabrics’ tools at the time. I include those links here because they go into some detail on the nature of many of the challenges – details I won’t repeat here.
But Vector Fabrics went out of business after they finally ran out of runway. Following a couple quiet years, I had a conversation at ARM TechCon with a company called Silexica doing surprisingly familiar things.
Silexica is on a path similar to Vector Fabrics. Whether they have better timing (it’s never good to be too early) or implementation focus or connections to the folks that need this, they’re plowing a familiar field. They’re leveraging the increasing availability of multicore platforms – and not just clusters of identical cores managed by the operating system (OS) (that’s the easy one – symmetric multi-processing, or SMP). They can also handle heterogeneous systems combining different CPUs and DSPs and even FPGA accelerators. There may be some SMP clusters in there, but other cores might have their own OS running (asymmetric multi-processing, or AMP), and some may be “bare-metal,” running no (or a very thin) OS.
We’ve noted before that, while identifying parallelism may have been the hard part of this technology to start with, it’s only the start. Implementing parallelism, however you come up with the strategy you want, can still be a lot of work, making productivity an important part of the value of any tools.
That said, taking an erstwhile sequential program and splitting it out to run optimally, with different pieces on different cores or even on different types of cores, is also a hard problem. And then implementing that partition, with the appropriate code bits for threading or run-to-completion or whatever – is a tedious problem.
To deal with this, Silexica’s tool suite has three major components: a parallelizer, a mapper, and a code generator. In addition, there’s a design-space exploration tool. Each solves either a hard or a tedious problem.
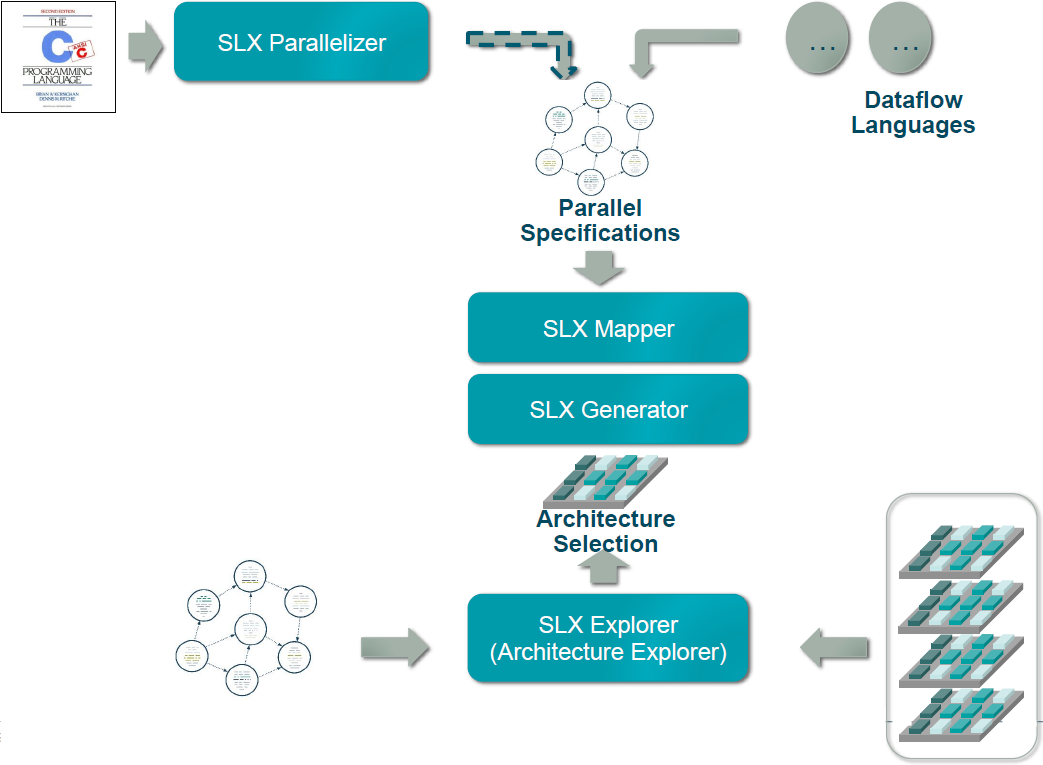
(Image courtesy Silexica)
Parallelizing
This is the original hard problem. And it’s a high-level, abstract one that has nothing to do with what multicore platform you’re using or how many threads you can run at once. It’s specific to the algorithm and nothing else. It does assume that you have a sequential (or serial) implementation of the algorithm. That may be because you’ve got production code that has historically run on a single core, or it could be because it was simply easier for an algorithm architect to think about it that way. Either way, it forms the starting point of the process.
It’s all about algorithms and data flow. In computing a particular result, there may be intermediate results that are calculated before the final one. That very nature is what mandates sequential code – code that must be executed in a particular order. If you try to parallelize it, you can get wrong results – perhaps because you calculated the intermediate result after the final one, meaning that you jumped on the final result too fast. There are mind-numbing variations on this theme.
I won’t go back into description of the various kinds of data dependencies that can thwart a parallel implementation; I’ll refer you back to those original two articles mentioned at the top of this one. While parts of the older discussion refer specifically to another company’s tools, it’s the overall ideas that matter.
On the other hand, there may be loads of things that happen in sequence in a program, but don’t need to. They do so only because, in a sequential paradigm, everything has to go before or after something else, whether or not that ordering matters in the calculated result. Understanding where order can and cannot be broken is the key to identifying how you can pull the program apart and still have it work correctly.
In fact, it’s so dataflow-driven that you don’t necessarily need a C program as your starting point. Silexica lets you use other dataflow languages, since the only thing you really need is an understanding of how data moves through the algorithm. Sounds simple, but once you start using complicated loop iterations, for example, identifying dependencies can be maddeningly difficult.
And so that’s what SLX Parallelizer does. It identifies where you can break the code order to run some parts on one core concurrently with other parts running on a different core. At this point, what core you might target isn’t a consideration. All in good time…
From a practical standpoint, what you will see if you start with a C program is a series of annotations in that program that show you where your parallelization opportunities are. Silexica runs their tools in an Eclipse environment, and they’ve customized it so that you can easily see the highlighted annotations. It will also show you an estimate of the potential gains you might see – in the abstract, anyway, since, at this point, it has no knowledge of specific cores and OSes.
The Parallel Spec
Just because you can split things up umpteen ways doesn’t mean you necessarily want to. And yes, you can have a very large number of parallel instances of code running concurrently – even in the thousands. That doesn’t necessarily mean you’re going to need to wade through each of those one by one – many will come through the breaking up of loops, where one change can create many separate parallel tasks.
As you view the opportunities, you may see some that simply aren’t worth implementing. After all, there may be overhead involved in the OS calls required for threading. If nothing else, there is some work required to do this, so you are likely to want to focus on those areas that provide the best possible return on the work.
So the job at this point is to create the parallel spec, and that’s a manual job. It involves taking the sections of code that will run independently and segregating them into separate code units. If you think you’re going to come back and maybe try a few different ways, then you probably want to leave your original sequential program intact, copying code out rather than cutting and pasting it out.
In order to help with some of the tedium later on, this is also when you can define some threading abstractions. Managing threads requires code – potentially multiple lines of code. And exactly what that code is will depend on how you want to manage things.
If you’re running a task under an OS, then there will be calls to the OS to manage the threads. But there are at least two ways of handling this, depending on the number of threads being created and the cost of creating and destroying threads. You can literally create and kill threads in real time as you need them and as you finish with them. Alternatively, if you don’t like that overhead, and if you have a large number of threads to manage, you can start your program by creating a pool of unallocated “worker threads.”
If you choose the latter approach, then when you need a thread, you won’t create one; instead, you’ll assign a task to an existing thread in the unallocated pool and run it. The real-time cost for that operation is less than that required for creating a thread anew. Likewise, when you’re done with the thread, you don’t destroy it; you retire it back into the pool.
These decisions aren’t made automatically by the tool; they’re made by the user as part of the overall strategy. And they influence what those little code bits will look like in each thread. So that’s why defining the code bits and abstracting them with a function name is also a manual job. We’ll come back to these code bits later.
Mapping
So far we’ve been dealing with the program or algorithm in the abstract, absent an actual computing platform. The effect that parallelization will have on real-world performance will depend on the platform you choose. (If you don’t know what platform to choose, well, that’s a different problem – and we’ll return to it.)
Let’s say you’ve got a board that has, oh, four identical cores with shared memory that can be managed as SMP, a smaller core running bare metal, and a DSP. And let’s say you’ve got a thousand threads to allocate to those cores. What’s the best allocation to use?
Good luck figuring that out manually! Before launching in, however, you also need to decide what your primary performance goal is. Is it throughput? Sometimes, by increasing the length of a pipeline, you can pump data through faster – at the expense of the amount of time it takes for a specific piece of data to make its way through – the latency. If latency is more important, you might use a different strategy.
This is the job of the mapper, and there are a few different strategies that you can set in order for the mapper to give you the result you want.
The information about the platform comes, essentially, from the board support package (BSP). That said, it may not be a part of the traditional BSP that your board vendor might provide, since this is a newer requirement.
The description that SLX Mapper needs is an XML file that describes the processor architecture as well as which OSes are used and how they’re instantiated. Both of those considerations affect real-world performance. Silexica has some such platforms already covered; users can also create their own.
Data communication also matters, and there are different strategies available, depending on the relationship between the cores running interdependent tasks. Do they share memory? Should they use mailboxes or semaphores? Is MCAPI implemented in the system? Imagine the many different possible cases of data communication, and you’re likely to conclude that this would be daunting to do by hand.
So the mapper takes the XML file and the parallel spec and figures out not only the best way to run the different tasks, but also the best way to communicate data. Any of those decisions can be overridden if you want, or you can simply go with what the mapper recommends.
What you get is a more realistic estimate of what real performance will look like. In the abstract, it might look like you can gain some performance by parallelizing a couple of tasks – and yet you might find, for example, that the overhead in thread management kills the performance gain. Because the mapper knows the speed of the cores and the cost of various OS operations, it can simulate their effects more accurately. So you may iterate here by playing with the parallel spec to get a better result.
Exploring platforms
Let’s come back to the scenario where you haven’t picked a platform yet – and you want to pick one that will make your algorithm shine. If you’re an architect trying to decide where your code should run, then you have another hard problem: figuring out which cores and OSes to use and how to connect them. Do you want only CPUs? All the same or different? Might a DSP help? How about a hardware accelerator in an FPGA?
SLX Explorer helps with this part of the job. It’s not going to magically invent a platform for you; you need to give it a number of alternatives; you populate the design space. The tool then goes through and shows you results based either on actual code or on rough timing annotations (if the completed code isn’t ready yet). Based on those results, you can pick a platform and move forward.
The Grunge Work: Implementation
After all of that work above, you’ve zeroed in on exactly how you want to fracture the original program, and you know what’s going to run on which core, and you know what results you should get by doing so. Only one little problem left: you haven’t yet written all the tedious code necessary to implement that parallelization. This is the domain of SLX Generator.
There are two important bits of code needed here: thread management and data communication. The latter can be done automatically, based on the communication strategies identified in the mapping operation. Each time data is sent or received by a task, the code required to make that happen is created by SLX Generator.
Threads or other means of parallel execution, on the other hand, are implemented manually, as we’ve seen. But there’s still some tedium that can be avoided by using the generator.
If you’re using threads, then you need the instructions that either create (and later destroy) the threads or allocate an existing thread (and later retire it). On the other hand, if you’re using an FPGA for hardware acceleration, you may need to copy the data into a buffer; there are DMA instructions and such needed before you can launch the accelerator.
These code bits are the ones I referred to above, when creating the parallel spec. The snippets will need to show up in all tasks; if done manually, it’s at best tedious and at worst error-prone. By identifying function-like entities early on, you can manually annotate code with the function calls.
But I should be careful to point out that these aren’t really functions in the classical sense. In fact, they’re more like macros. Which got me thinking: since we’re dealing with the C language here, why not simply define a macro in a header and then just reference the macro?
That’s actually doable in some cases, but not in all cases. Silexica points out that it would be hard to handle the FPGA launch code that way, for example. So they have a similar capability that goes beyond what the C pre-processor can do. By abstracting a bit higher, they can handle more scenarios – as well as move beyond C if they want to.
The net result is that, as a coder, you would put your “function” or “macro” call each place where needed, and SLX Generator would then swap in the lines of code that you associated with that call.
So that’s our whirlwind tour of the Silexica tools and methodology. Is the timing now right for this? Have they found just the right formula for attracting users? That remains to be proven. It’s something we’ll keep an eye on.
*Full disclosure: I worked with Vector Fabrics at one point, long before covering them.
More info:





Do you need to parallelize sequential code for multicore? What do you think of Silexica’s approach?
Not particularly impressed with Silexica’s approach, and I have a long history in parallel programming, and both instruction/data level hardware/software/algorithm architecture issues driving it. Knowing what the bottlenecks in parallelism are, is critical to managing performance results, and getting a near optimal execution profile.
Amdahl’s law always applies to the hardware/software/algorithm architecture. If you don’t understand this, you need to start with a parallel programming class at the local university as continuing education. Or if you have enough self discipline, pick up the text and syllabus and complete the self study … you can always hire the class tutor to help fill in the gaps. I strongly recommend just taking the class, doing the required reading/homework/projects and ask every question in class/lab till you understand.
In most cases carefully looking at the C execution profile data, and cache fault data, will clearly tell you what the bottleneck and resource issues are. You should then have a better idea of what hardware architecture you are looking for … in particular cache size/architecture, ISA pipelining required, number of cores required, and how to avoid memory bottlenecks during thread construction.
When programming in C/C++ you must then optimize memory performance (most common critical bottleneck) with cache friendly changes to data layout/packing. This will often be benefited by changing outer loop orders to minimize cache faults. In some cases, this requires moving some data handling between core functions, to take advantage of data sitting in the cache, that would be later lost with the existing algorithm structure and sequencing.
Then alter/isolate independent sequential inner loop functions into well defined cooperating threads, pipe-lining where possible. Choosing/allocating threads with non-overlapping L1/L2 memory requirements where possible.
Move the C/C++ implementation into OpenMP, provide the pragmas for critical parallelism hints, and let the tools take care of fine grained, ISA appropriate parallel optimizations.
It’s rare, if not outright clueless optimism, to expect that any tool will magically take raw unoptimized code, and produce results that are even 10-20% of manually optimized code. Simple cases, maybe … larger code bodies, with poor data locality in the core algorithms, broken into hundreds of functions, pretty unlikely.
I think the most offensive part of the product, is the lack of truth selling it on their website, starting with the front page.
Parallel programming is SEVERAL strict disciplines for different architectures, as are the disciplines for performance optimization. The former can be learned in parallel programming classes at the college level, the latter less so, but sometimes taught well in a combination of graduate level algorithms/data structures classes and machine architecture classes. In reality all of these should be pushed down into required undergrad classes, at least as a strong intro in 101 language classes, locks/events/threads in an advanced undergrad class, as mandatory.
This starts by understanding the problem domain, Flynn’s taxonomy: Single data stream — SISD MISD, Multiple data streams — SIMD MIMD SPMD MPMD. It also starts by understanding the fundamental limits to parallel performance, Amdahl’s law and Gustafson’s law. It also starts with understanding what the machine architecture and ALU/pipeline/Cache/Memory performance relationships.
The truth is that 10’s of thousands of programmers do serious parallel programming with threads (SMP and NUMA clusters) every day, and many of those are doing heterogeneous mixtures of SMP with application specific accelerators (GPU’s or FPGA). And many more are doing distributed application in a tight or loose cluster environment, either with client/server architectures, or with MPI style tools in cluster computing, massively parallel computing, or grid computing environments.
So the misleading hype on Silexica’s home page, is really targeted at the unskilled professionals to scare them into believing this is the ONLY solution.
Silexica falsely asserts: “Multicore software applications are generally programmed with time- consuming and complex manual techniques that can’t accommodate the exponential growth in the number of required processor cores. Without Software Design Automation tools, this design complexity can’t be solved.”.
The truth is OpenMP handles this transparently for homogeneous SMP environments, and MPI style tools handle this transparently for both homogeneous and heterogeneous clusters, with in the scaling limits of the bisection interconnect bandwidth. Or for less regular applications, the fit of the problem to the communications architecture.
Silexica takes Steve Jobs Snow Lepoard statement out of context “The way the processor industry is going is to add more and more cores, but nobody knows how to program those things,” he said. “I mean, two, yeah; four, not really; eight, forget it.”
The truth is that Steve made that 2008 statement to sell OSX Snow Leopard support with Grand Central Dispatch (GCD) to take full advantage of multi-core Macs. That was a decade ago. It is grossly, and purposefully misleading for Silexica to take only the negative half of Steve’s comment out of context, when Steve was actually pitching Apples GCD multi-core support tools combined with OSX OpenCL GPU support. GCD automated fast light weight threads in OSX, with dynamic configuration/tuning done by GCD/OSX.
Silexica also takes Mattson’s (of Intel) comment out of context “We stand at the threshold of a many core world. The hardware community is ready to cross this threshold. The parallel software community is not.”. Mattson also says “My hypothesis is that we can solve [the software crisis in parallel computing], but only if we work from the algorithm down to the hardware — not the traditional hardware first mentality.”
The truth is that Tim and Intel did that by supporting the OpenMP initative, which by their words “The designers of OpenMP wanted to provide an easy method to thread applications without requiring that the programmer know how to create, synchronize, and destroy threads or even requiring him or her to determine how many threads to create. To achieve these ends, the OpenMP designers developed a platform-independent set of compiler pragmas, directives, function calls, and environment variables that explicitly instruct the compiler how and where to insert threads into the application.”
http://www.openmp.org/wp-content/uploads/Intro_To_OpenMP_Mattson.pdf
http://software.intel.com/en-us/articles/getting-started-with-openmp
Driving a car is hard and scary without basic training plus experience. So is parallel programming, a modern day MUST HAVE for every programmer.
Learning the basics of parallel programming and the associated challenges is always going to enable the engineer to make better decisions. However, you would probably agree that this approach doesn’t scale fast enough in a manual process. For times like that automated tools are necessary to gain the productivity.
Innovation begins when you start looking at a problem differently and when you attempt to solve problems by building stepping stones along the way toward a final approach.
Simulation based approaches have long been the staple of searching a
design space for optimality and anecdotal experience or context can trim
the design space but not automate the process.
@KumarV — two significant issues, that can, and most probably do completely change this view point.
First, performance wise, typically less than 10% of the code body and algorithms consume better than 90% of the resources. Often this is less than 1% of the code body/algorithms consume well better than 99% of the resources.
Applying unnecessary controls, and extra design considerations to the non-critical 95-99% of the code body, both drives up costs, and increases complexity of the over all design … additional simulation of this part of the code body is frankly a HUGE time waste labor resources, with near zero return, except for driving the schedule significantly longer if time to market isn’t an issue.
If any effort is to be invested on top of the basic design for this 95-99% code, it would be toward formal verification goals, to reduce releasing to market rarely induced faults and errors.
Second, automated tools introduced into the critical 1-5%, are more likely to reduce the deterministic results of a strict performance oriented coding style that is already highly optimal by design. A very small senior team (2-5 people), that fully understands the design, can generally handle the core performance concerns, even for the largest projects.
Arguing you can do detailed simulations before the critical code body is written, has a significant chicken and egg problem … often only little clues about firm resource use numbers, and latencies, will exist. You get those numbers by completing the core design, and measuring. This is where unexpected latencies pop up from hardware issues, and critical path code body issues (like poor cache/memory performance, or poor choice of processor ISA pipe-lining, or some limiting bisection bandwidth constraint when the system is more complex than simple SMP).
Of course, if this critical core is being designed and written by a very junior team, we can easily increase development times by an order of magnitude by adding even more complexity up front for them to burn time on. And maybe they will not have to finish the project, before it’s cancelled.
In most cases, a senior team can rapid prototype a core design, plus several alternative core designs, in less than 5% of the development schedule to validate core design decisions and hardware/software architecture. Then run real/synthetic data through the prototype to get firm measurements to confirm the hardware/software architectures performance. It’s not clear that layering a more complex design strategy on top of this will reduce the schedule, or increase the finished systems performance.