


As usual, there are so many things going on in my life that I no longer know whether I’m coming or going. A few weeks ago, for example, I presented BeBop RoboSkin, which is a skin-like covering that can provide humanoid robots with tactile awareness that exceeds the capabilities of human beings with respect to spatial resolution and sensitivity. The example that really took my breath away was seeing a robot’s finger reading braille.
In my most recent column — Halodi’s Humanoid Robots are Already Amongst Us! – I introduced a self-balancing human sized robot called EVE boasting two-arm manipulation that can squat down to pick things up off the floor or out of cupboards and reach up to put things on shelves.
As I’ve previously mentioned, in a few weeks’ time I’m going to be giving a guest lecture to a gaggle of MSc electrical and electronic engineering students at the Norwegian University of Science and Technology (NTNU) in Trondheim. As part of this talk, amongst a cornucopia of topics, I will be discussing both Bebop RoboSkin and EVE.
In the case of the former, I’ve ordered a bunch of Braille Alphabet Sheet handouts from The Braille Superstore because I want the students to see for themselves (no pun intended) how hard it is to determine the pattern of dots under one’s finger.
As an aside, I find there’s always something new to learn. For example, I just ran across the following picture on Wikipedia. At first, I was confused by the combination of raised and indented dots. Then it struck me that, by offsetting the patterns, it’s possible to “print” braille character cells on both sides of the page. Color me impressed!
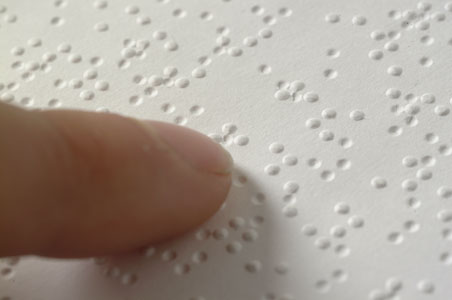
Close-up of interpoint braille page (Image source: Wikipedia/Lrcg2012)
Furthermore, I’ve been told that there may already be an EVE at NTNU. If so, it would be awesome if it could attend my lecture with someone controlling it in its VR Avatar mode. I’m imagining EVE acting like a mime, performing actions like looking up at my slides on the big screen, approaching members of the audience and examining their notes, coming close to me and leaning over to examine any objects I hold up for display, all the while using gestures to indicate astonishment and awe at appropriate points in the presentation, concluding by genuflecting obsequiously and leading the tumultuous wave of applause at the end (I’m blushing already).
As amazing as EVE is, I keep on reminding myself that a captivating creation of this ilk all starts off with something simple, like an humble hobby servo in the case of the animatronic noggin created by yours truly and my chum Steve Manley (if the truth be told, Steve has done the bulk of the work while I’ve played to my strengths and focused on offering useless suggestions).
Having said this, even hobby servos aren’t as simple as I had originally supposed. As part of a series of articles I’m writing for Practical Electronics, which is the premier electronics and computing hobbyist magazine in the UK, I was planning on deconstructing a small 9g hobby servo and taking pictures of its inner workings (note that the “9g” application refers to the weight of the servo, not the torque (“twisting force”) it can produce, which—for this type of device—is typically in the order of 2 kg-cm at the servo’s arm, also known as the servo’s “horn”).
Happily, I mentioned my deconstruction plans to Steve, who opined he could do a far better job using his copy of Autodesk’s Fusion 360 computer-aided design (CAD) package. He started by purchasing a few cheap-and-cheerful AZ-Delivery MG90S Micro Servos from Amazon in the UK, which is where he hangs his hat (in the UK, not at Amazon).
Armed with his trusty micrometer, coupled with a microscope he used to count the teeth on the gear wheels, Steve came up with the following awesome renderings.
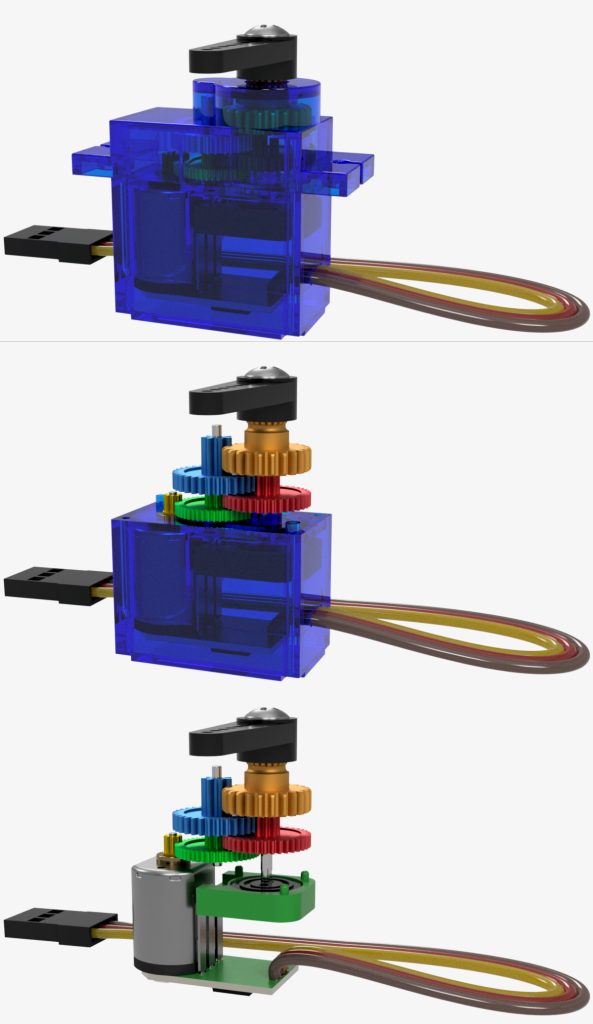
Renderings of a generic micro-servo (Image source: Steve Manley)
The small circuit board mounted under the motor carries the control electronics, which feature a KC9702A control chip. The green plastic part mounted to the output shaft and located under the red compound gear contains a potentiometer that is used to determine the servo’s present position. The KC9702A control chip interprets the PWM signal coming from the outside world. It then uses the value from the potentiometer to determine the difference between the desired and actual positions of the output shaft and drives the DC motor accordingly.
There are 9 teeth on the bronze-colored input gear attached to the motor; 47 and 10 on the two elements forming the green compound gear; 38 and 8 on the two elements forming the red compound gear; 32 and 7 on the two elements forming the blue compound gear; and 23 teeth on the gold-colored output gear attached to the output shaft. The result is to give a combined gear ratio for the whole gear train of around 260:1. If we exclude the knobbly bits sticking out of the top and sides of the servo’s case, this all fits in a teensy tiny package around 23mm x 29mm x 12 mm, which equates to only eight cubic centimeters.
Just for giggles and grins, Steve ran the calculations for a two-gear system using the same 9-tooth input gear and having the same 260:1 gear ratio, only to discover that this would require the output gear to have 9 x 260 = 2,340 teeth and a diameter of 468mm!
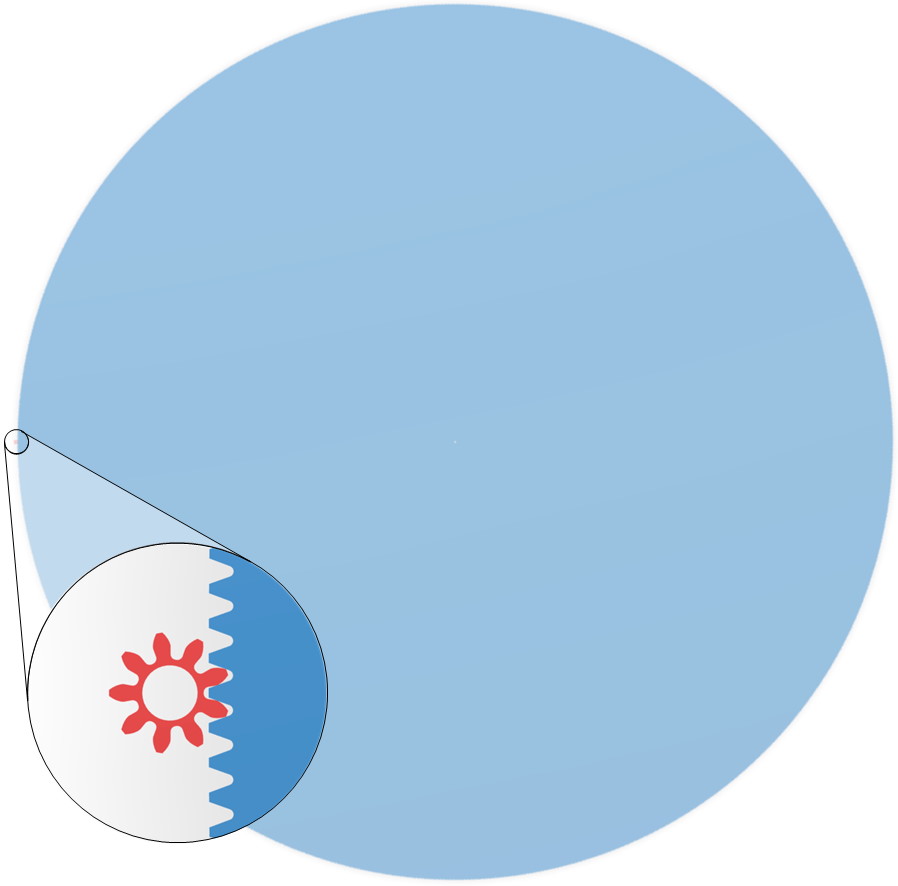
Without gear trains, models would be bigger than the real-world objects they were representing (Image source: Steve Manley)
Unfortunately, none of the above was what I was intending to talk about. I’m afraid I got a little carried away. Why didn’t you stop me?
What I really wanted to babble about is a company called SpinDance. The guys and gals at this 20-year-old powerhouse first came to my attention when I was hosting a webinar on IoT Central a few months ago as I pen these words. The title of the webinar was Assessing Readiness for Machine Learning in the IoT, and the key speaker was Ben Jacques, who is Director of Engineering at SpinDance.
In a follow-up video conference call with Ben, I asked him why people should be interested in talking to the chaps and chapesses at SpinDance—what do they offer that no one else offers that allows them to stand proud in the crowd? Ben responded by proclaiming that, unlike many competing companies, “The IoT is our thing!” Ben went on to say that there are a lot of software consulting companies out there doing all sorts of great stuff but—if you really look at their offerings—the IoT often appears as a sub-sub-bullet in their selection of services. By comparison, the IoT is SpinDance’s raison dêtre, as it were—it’s what they specialize in and what they love, from embedded firmware to mobile applications to web applications to the cloud.
SpinDance is hardware agnostic, mobile agnostic, and cloud agnostic, using what’s best to address each of their customers’ unique requirements. In addition to software architecture design and software development, the folks at SpinDance offer a variety of services including reviews and assessments of existing designs and potential projects, IoT Training, IoT Consulting, and IoT Maintenance (e.g., ensuring your physical devices remain compatible with evolving operating systems and environments).
In a crunchy nutshell—from R&D and proof-of-concept to prototyping to production-grade systems—SpinDance offers full-stack IoT solutions that minimize the risk and maximize the reward, and you can’t say fairer than that!


