


Things have changed a lot since I was young, not least that all my friends got old (I didn’t see that coming). Take automobiles, for example. My parents bought their first car when I was about six years old, which would make it around 1963. I have no idea what sort of car it was. All I knew was that it was small and noisy. Also, that noisy was good because it was amazing how often it failed to start.
Update: I just had my daily FaceTime chat with my dear old mom. She says our first car was a Morris Minor 1000. I immediately had a quick Google while no one was looking to find this little beauty on the Wikipedia. Just looking at the pictures takes me back to when I was a little lad bouncing about on the back seat screaming along with the other passengers as my mother hurled round any corners on two wheels.
These days, we have every expectation that our cars will start the first time every time. When a car doesn’t immediately roar into life, we are totally taken by surprise. By comparison, in those days of yore, the graunching sound of a non-starting car barely raised an eyebrow (although I did get to add some interesting words to my vocabulary).
Power steering? Don’t make me laugh! Even though ours was a small vehicle, persuading it to turn a corner was equivalent to a workout at a gym. Collision warnings? “WATCH OUT FOR THAT CAR!” Parking assist? “Can you get out and guide me in?”
I was trained using a gearshift. Since space is in short supply in England, most shops and stores don’t have dedicated parking areas, so parallel parking is the norm. I remember when I first moved to America in 1990. I borrowed a book titled something like, “So, You’re Moving to America,” from the Sheffield City Library. One piece of advice that stuck in my mind was, “If you are from England, Scotland, or Ireland and an American asks where you are from, you can tell them that you are from England, Scotland, or Ireland because they will at least have a clue where those countries are in relation to America and to each other. However, if you are from Wales and an American asks where you are from, tell them that you are from England, Scotland, or Ireland, otherwise you will spend the rest of the day explaining what and where Wales is!” Of course, this has got absolutely nothing to do with what we are talking about here, but it’s a true story that I remember to this day.
I also remember taking my driving test a few weeks after moving to Huntsville, Alabama. I was using a company car at the time. This event commenced in an interesting manner when the examiner asked, “Do you have a qualified driver to take you home if you fail your test?” He was somewhat perturbed when I answered in the negative. He was even more perturbed when he asked how I planned to get home should he fail me, at which time I whipped out my “International Driver’s License.” After locking eyes for a few seconds, he gave in and resignedly said, “Right, let’s get started.”
On arriving in America, I was amazed to discover how even small stores had their own parking lots (“car parks” in England). This means that people usually drive straight into a parking space. As a result, most of the Americans I know are useless when it comes to parallel parking. By comparison, coming from England, I was a diva on the parallel parking front, to the extent that my driving test examiner almost broke out into spontaneous applause (spreading a little joy is just one more service I offer).
The reason automobiles are much on my mind, and thus for the preceding waffling, is that I was just chatting with Matthias Feulner, who is Senior Director for advanced driver assistance systems (ADAS) at NXP.
Today’s automobiles are equipped with an abundance of sensor systems, including cameras, radar, and ultrasonic sensors, with lidar starting to gain traction. None of these systems is inherently better than the others. Each shines (no pun intended) in different ways, and all have their own advantages and disadvantages. Radar is useless when it comes to reading road signs, for example, while the efficacy of camera-based vision systems degrades in conditions involving fog, sleet, and snow.
Having said all this, the focus (again, no pun intended) of my chat with Matthias was on radar only. He started by noting that, driven by safety mandates, most new vehicles over the past couple of years have been equipped with three radar sensors as illustrated below.
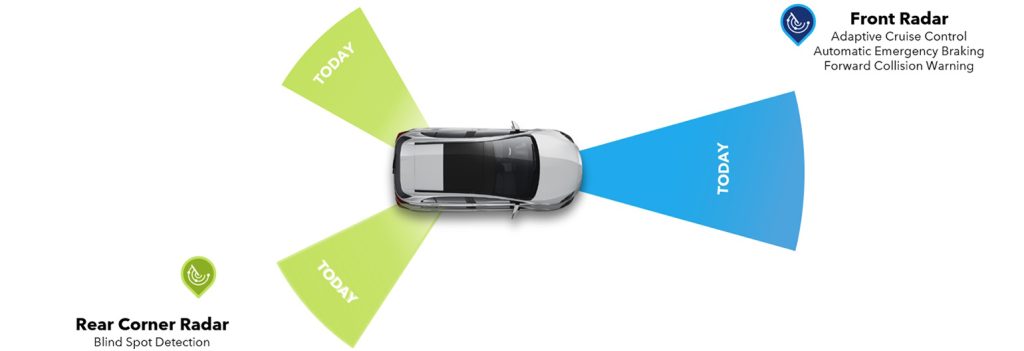
Typical 3-sensor automotive radar environment circa 2023 (Source: NXP)
Matthias went on to say that, by 2025, we can expect to see our cars equipped with many more sensors of all types. In the case of radar, typical mid-range cars can expect as many as five sensors (four in the corners and one at the front). By comparison, premium cars may have ten or more radar sensors to provide 360° coverage in what NXP refers to as a “radar cocoon.”
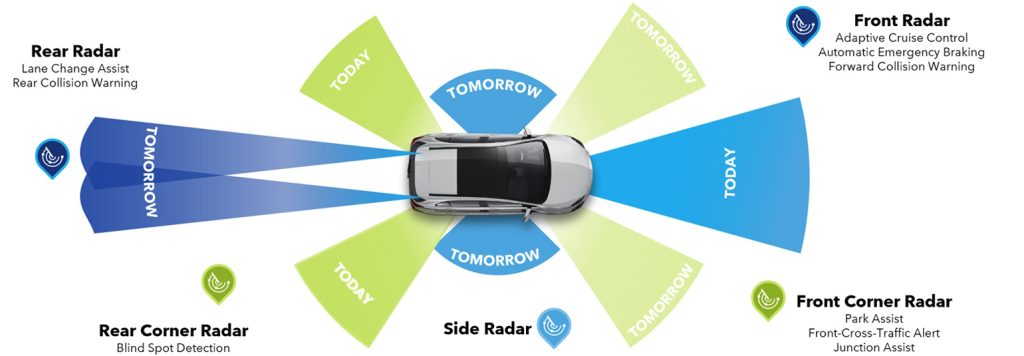
By 2025, cars may have 10 or more radar sensors (Source: NXP)
One interesting point raised by Matthias is that OEMs increasingly want to move away from making a one-time sale by introducing service/subscription-based models that can generate additional revenue streams throughout the life of the vehicle. One possibility is for more and more vehicles to be delivered fully loaded with sensors whether you (the customer) want them or not. The point is that not all of these sensors will be enabled from the get-go, but they could be activated as time goes by. This would be an up-front investment made by OEMs in the expectation that they will be able to sell add-on features, functions, and services down the road. (“Down the road.” Get it? Tell your friends, I’ll be playing here all week!)
In addition to cars carrying more radar sensors, these sensors need to have greater range. For example, today’s forward radar sensors typically have a range of 200m, but this will soon increase to 300m or more. Similarly, today’s corner radar sensors typically have a range of 70m, but this will be increased to 140m or more.
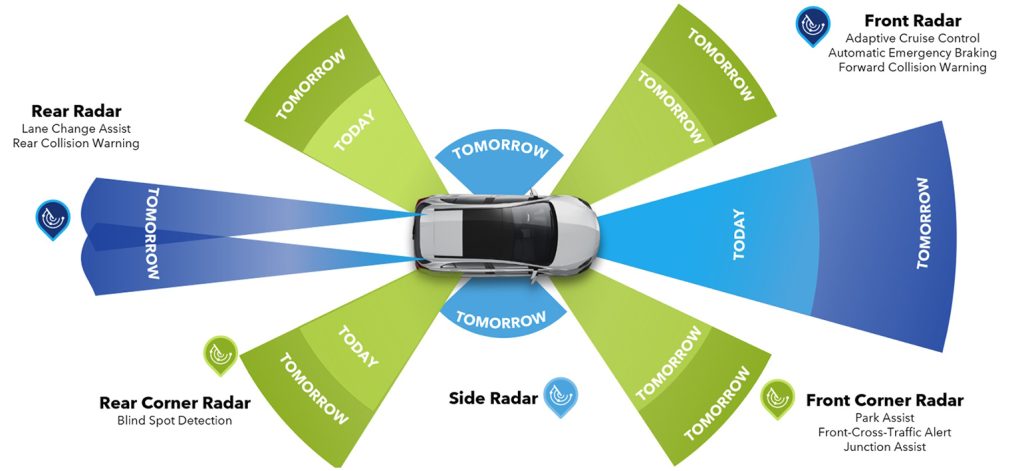
In addition to more sensors, these sensors will have greater range (Source: NXP)
But wait, there’s more because—in addition to greater range, these sensors also need to provide higher resolution. This requirement primarily commenced in the context of the front radar sensors, but it’s now extending to the corner sensors and other sensors.
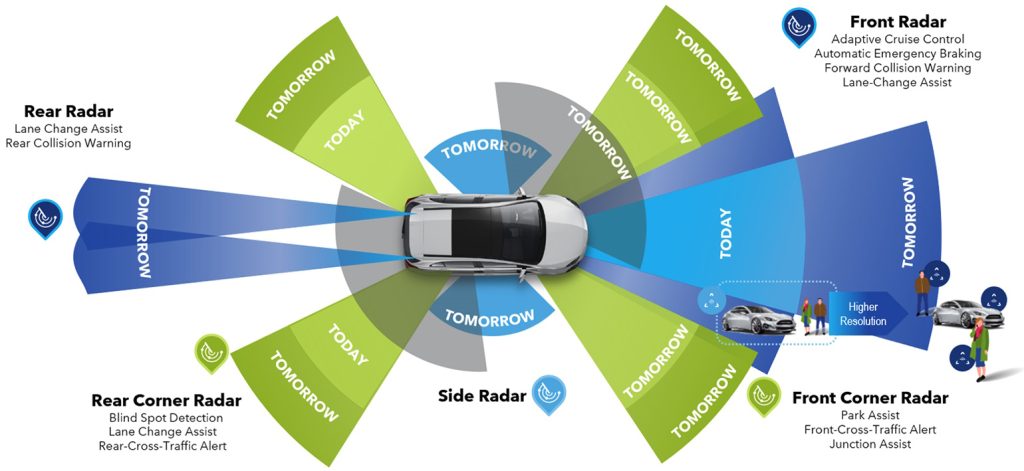
In addition to greater range, radar sensors will have higher resolution
(Source: NXP)
You may wonder as to the reason there are only two side radar (the gray areas) shown on the diagram above. I asked Matthias if this is intended to imply that we will be able to make only left turns in the future. He responded that there should really be four gray areas overlapping to provide 360° coverage, but that he’d left two out to keep things simple. To be honest, considering everything else that’s going on in this picture, apart from the raising of a quizzical eyebrow, I still haven’t been able to come up with a snappy comeback to this.
Having large numbers of high-resolution, extended-range radar sensors is going to open the doors to a cornucopia of possibilities. Let’s start with what is known as weak target, vulnerable road user (VRU) identification and separation, which means having the ability to detect and distinguish smaller objects in the presence of larger objects, like a pedestrian standing next to a car or a motorbike rider driving next to a truck. One key to this is having lower phase noise, because noise can mask smaller objects that give weaker reflections.
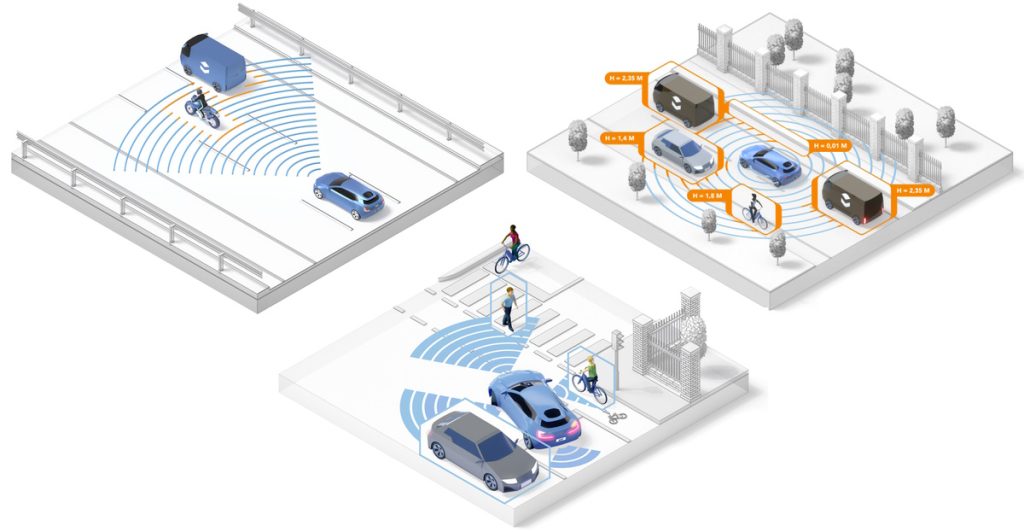
Better radar sensors unlock a range of possibilities, including weak target/VRU identification and separation (upper left) and advanced 4D elevation and multi-mode sensing (lower middle), all resulting in a 360° radar cocoon (upper right)
(Source: NXP)
In addition to scanning in a horizontal direction, it’s also necessary to have the ability to scan in a vertical direction in order to determine the height of objects. Also, the required resolution depends on the range and operating mode. Being able to resolve an object’s height to within 10cm may be acceptable at a range of 300m, but it’s necessary to achieve a resolution of 1cm to 2cm when driving over a bump in the road or entering a covered parking garage, for example.
According to Yole Intelligence, NXP is the market share leader in automotive radar. So, it comes as no surprise to hear that NXP recently announced the SAF85xx, which is an industry-first 28nm RFCMOS radar one-chip IC family for next generation safety-critical ADAS and autonomous driving systems, including automated emergency braking and blind-spot detection.
The SAF85xx one-chip solution is comprised of a highly integrated RF front-end and a multi-core radar processor. “How big is this bodacious beauty?” I hear you cry. Well, here’s a picture of an SAF85xx compared to a European 1-cent coin.
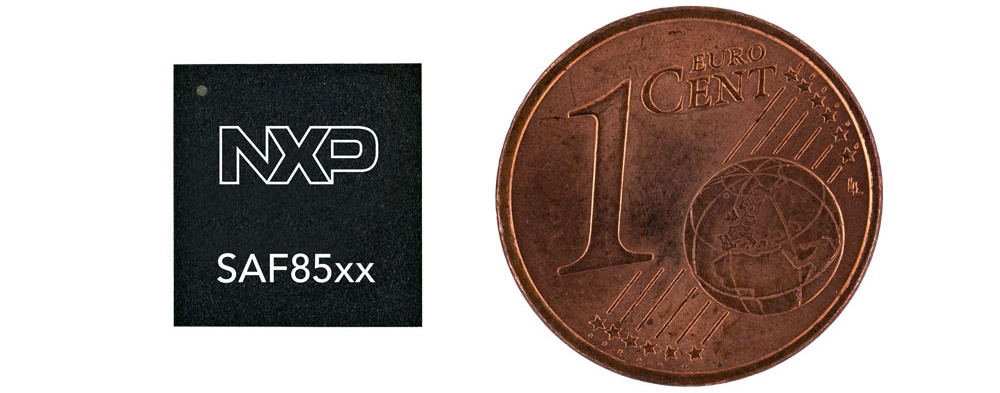
SAF85xx versus a European 1-cent coin (Source: NXP)
“Ah, ha,” you say, “but how big is a European 1-cent coin?” There you have me I’m afraid. I haven’t got a clue. It could be the size of a dinner plate, for all I know. Once again, Google comes to the rescue, informing us that the European 1-cent coin is 16.25mm in diameter, which makes it noticeably smaller than the American penny, whose diameter is a relatively whopping 19.05mm.
Matthias informed me that the SAF85xx is 30% smaller than the previous generation, it has 40% increased compute performance compared to the previous generation, and it boasts a 2X RF performance step-up with respect to the previous generation.
“What does a 2X RF performance step-up mean?” I asked. “That’s a good question,” Matthias responded. (I think he may have winced a little, but that might be because he’d been saying, “That’s a good question” a lot.) It turns out that “RF performance” isn’t a single thing, but instead reflects (again, no pun intended) a multitude of facets, including longer range, lower noise, and higher resolution.
Today’s 5G communications involve the use of multiple-input and multiple-output (MIMO) techniques, in which multiple transmitting and receiving antennas can be used to implement beamforming. Similarly, NXP’s SAF85xx boasts support for four mmWave transmit antennas and four mmWave receive antennas, resulting in 4 x 4 = 16 virtual antennas (I’m not 100% sure what “virtual” means in this context, but it sounds exciting).
Matthias notes that different antennas can be devoted to different tasks. For example, three beams could be scanning in a horizontal direction while one beam scans in a vertical direction, thereby providing a better idea as to the dimensions of different objects in the vicinity of our automobile. Alternatively, the system could be employing a mix of short, medium, and long-range modes, and it can support multiple modes simultaneously without need of time-division multiplexing (TDM).
When the SAF85xx is combined with companion components, including power management, in-vehicle networking (e.g., CAN bus, Ethernet), and the transmit and receive antennas, the whole solution can be presented and packaged as a very compact 5cm x 5cm sensor device. This small size is important because OEMs are increasingly putting weight on aesthetics, and they require the ability to mount sensors in occluded, space-constrained locations like behind bumpers, for example.
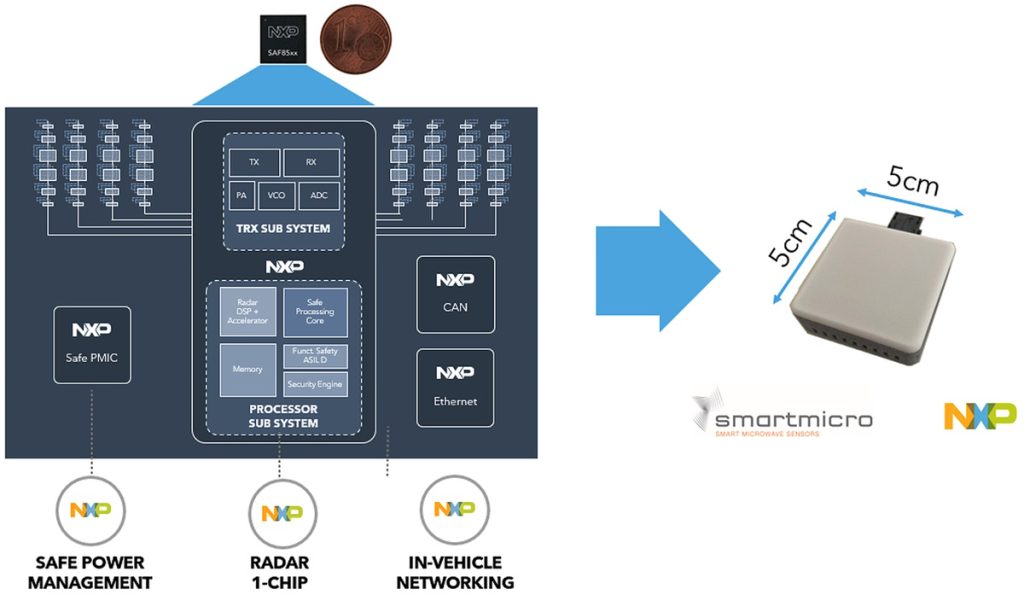
The SAF85xx in the context of the complete radar sensor subsystem
(Source: NXP)
To be honest, it took me a few seconds to wrap my brain around the image above, but the 1/3 width column in the middle (with the “Radar 1-Chip” annotation) reflects the contents of the SAF85xx. Everything outside this is implemented using additional NXP devices.
I know it’s been almost 60 years—which really isn’t all that long in the grand scheme of things—but I’m blown away by how much things have progressed when I compare the car I’m currently driving (a 2019 Subaru Crosstrek) to my parent’s old Morris Minor 1000. First, there’s the fact that my car starts on a regular basis. Second, my car has features like push-button ignition along with electric windows and door locks. Third, my car has air-conditioning (all we had in the old days was the ability to wind down the windows, and even that went away if the handle fell off).
These features alone would have been luxury items that would have had people gasping with astonishment and squealing with delight back in the day. Folks circa the 1960s simply would not have believed all the ADAS and driver-assist features flaunted by my Subaru, like adaptive cruise control, forward collision warning coupled with emergency braking, and the fact that the little scamp assumes control of the steering wheel if I start to drift out of my current lane without first using the indicator. I already feel like I’m driving in a cocoon, and what we enjoy today is but a tempting taste of the super-cocoons that are to come.

Basking in the safety of an automotive radar cocoon (Source: NXP)
What say you? Do you have any stories you would wish to tell regarding the automobiles of your youth, or any thoughts you would care to share regarding vehicles of today or tomorrow?


