


A couple of years ago, our pages were full of MEMS and sensor innovations, each touting an improvement over something in the past. Then… things quieted down. What happened? Well, it seems like everyone went from “I’ve got an awesome new idea” mode to “Now I need to produce this and make some money” mode. That latter involves a lot of basic blocking and tackling and doesn’t garner near the headlines.
But does that mean that new ideas and innovation are on hold for a while? Not according to a presentation that Alissa Fitzgerald made at last November’s MEMS Executive Congress (MEC), put on by the MEMS Industry Group (MIG) – recently renamed to MEMS and Sensors Industry Group (still abbreviated MIG). She spent an hour summarizing what she had seen as the most interesting and promising emerging technologies for MEMS and sensors. They span anywhere from needing a couple more years to more than 10 more years to be ready for prime time. Granted, they’re done by universities rather than companies, but they’re interesting nonetheless.
This whole “are we there yet?” thing has a rating system that NASA set up and that Ms. Fitzgerald used to set expectations as to how far out this stuff is. It’s the Technology Readiness Level system, and it runs from TRL 1, which is the earliest stage of exploration, all the way to TRL 9, at which point someone is putting on the finishing touches, doing final integrations tests, and tying that shiny red bow.
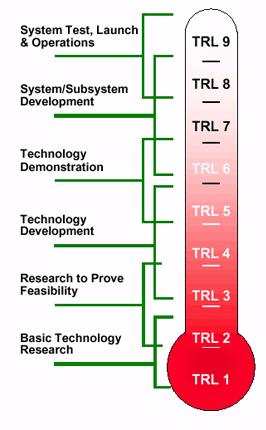
Image source: Wikipedia
Her presentation was directed at the executive types who populate the MEC, so I thought it might be interesting to dig one (and only one) level deeper to explore more of what is going on from a technical standpoint for our esteemed engineering audience. That meant crawling through 16 technical papers from far-flung disciplines – while struggling to keep my nose above water – in order to extract the essence of what’s going on in eight different areas of development.
So what we’re going to do here is traverse those different areas and summarize what appear to me to be the key elements under development. I’ll list the papers along the way. But my sense is not that these are definitive papers that launch or define a particular space, but rather are good examples of what the status is and what work is being done. In other words, there will be lots of other papers before and after these for each of these types of sensors. (Note that most of the papers are not freely available, so you may need to contact a specific university or conference if you’re not entitled to read them behind their paywall.)
This also doesn’t mean a definitive exposition of everything important that’s happening. It represents Ms. Fitzgerald’s judgment as to what’s new, interesting, and promising. Some might add to or subtract from her list. But given her standing in the industry, there were plenty of listening ears as she went through this.
As she did in her presentation, we’ll proceed from the most developed ideas (higher TRL levels) and work our way back to things that are more speculative. The applications and “ratings” at the end of each section reflect Ms. Fitzgerald’s judgments. I’ve put a link to her original presentation (with her permission) at the end.
We’ve done tons of coverage of motion sensors in these pages, and yet most of it is consumer-grade stuff costing very little – and without the accuracy you would want in order to have one of them navigate you from airport to airport or to guide deadly munitions on a surgical strike mission. Navigation- and tactical-grade (a tactful way to say “military grade”) specs have eluded MEMS technology so far, and size and pricing both qualify as enormous when compared to MEMS gyros.
We took a look at Sensors in Motion’s efforts to do a nav-grade MEMS gyro almost exactly a year ago; there are still other university projects aiming to nail this particular technology. (Sensors in Motion’s website no longer appears active, so I am going to assume that they ran into some difficulties along the way.) The critical issues here involve reducing bias drift and establishing better robustness against shock and vibration (the latter a theme you may remember from Qualtré).
A common thread in the papers was what they call “mode matching”: lining up the actuation and sensing modes and frequencies. By aligning the driver and sensor, largely by matching the mechanical design, they’ve been able to achieve much higher quality levels. But the challenge is to keep these modes matched, and there’s enough manufacturing variation and environmental variation that you can’t just calculate or simulate a solution and fix that into the design. Active circuitry is needed to automatically keep the driver and sensor in synch.
This means that a new figure of merit for such sensors is the difference between the drive and sense frequencies, expressed as ppm. In a paper by Ren et al at Taiwan’s National Tsing Hua University, they achieved a 167-ppm split on a symmetric circular design, with resonance at 131 kHz and Q levels of 7160 and 6498 for the drive and sense, respectively, in a vacuum.
Meanwhile, the team of Shiraz et al at Georgia Tech noted that the bane of all gyros, “bias drift,” tends to originate out of common mode elements in the basic gyro equations. Unlike the Ren et al gyro, this uses bulk acoustic wave (BAW) resonance as the drive mechanism. They use two vibration modes with a differential architecture so that they can add the two to eliminate the effect of rate on the drive loop while using the difference to determine the output with bias nearly cancelled. The result was a decrease in drift by a factor of 45.
The above papers also involved ways to increase the effective plate area, improving resistance to noise.
Finally, a team of Giacci et al at Politecnico di Milano took on the MnNEMS approach that Leti introduced a few years back. This involves MEMS-level proof masses and NEMS-level piezoresistive gauges for multiplying the stress and boosting the signal. They were able to achieve good vibration rejection.
- Application areas for these: precision GPS-free navigation; drones; self-driving cars.
- TRL 4; needs design optimization and time for the process to mature. Less than 5 years.
- Exemplary papers:
- Ren, J, et al, A MODE-MATCHING 130-kHz RING-COUPLED GYROSCOPE WITH 225 PPM INITIAL DRIVING/SENSING MODE FREQUENCY SPLITTING, Transducers 2015, Alaska
- Norouzpour-Shirazi, A., et al, A DUAL-MODE GYROSCOPE ARCHITECTURE WITH IN-RUN MODE-MATCHING CAPABILITY AND INHERENT BIAS CANCELLATION, Transducers 2015, Alaska
- Giacci, et al, VIBRATIONS REJECTION IN GYROSCOPES BASED ON PIEZORESISTIVE NANOGAUGES, Transducers 2015, Alaska
Zero-Quiescent-Power Sensors
While some fundamental sensors (not gyros) are naturally zero-power, it takes electronics to measure and report the measurements taken by those sensors. If such sensors are always on, then you have to keep the electrons flowing during the long times during which there may be no activity.
There are applications where you want something to monitor something else and have it report when there’s an anomaly or an unusual event, and a couple of sensor projects explore this realm. They rely on mechanical amplification and non-linear measurement under sleep circumstances, which can be had “for free.” Only when things get exciting does the thing power up.
The idea is that some element moves in response to vibration or other mechanical motion. If the movement is small, then nothing electrical happens. If there is enough movement, however, it causes one metal mechanical piece to touch another, which causes the power to fire up, a more precise measurement perhaps to be taken, and a message perhaps to be sent out.
This area features what’s called a resonant switch, or “resoswitch.” These are considered useful for applications where switching at a constant rate is needed (power conversion, for example). This improves performance while reducing the actuation voltage needed. I’ve included a link to a paper below that describes resoswitches in great detail.
Liu at al from UC Berkeley created a structure that includes a metal shuttle connected to VDD. It slides back and forth, side to side, but at either side there’s a metal rail, and when the shuttle moves far enough to hit this rail, it transfers power to the rail. Their application for this is detecting and demodulating frequency-shift keying (FSK). If the incoming signal is in the resonant range (let’s call this a 1), then the shuttle moves enough to tap the sides, creating an on-off keying (OOK) signal. If the signal is outside the resonant region (we’ll call it a 0), then there is no such response. The response channels had really abrupt edges, meaning that multiple channels could be closely packed.
Meanwhile, Tang et al, from the University of Chinese Academy of Sciences and Soochow University in China, worked on a vibration sensor that wasn’t geared so much towards taking a precision measurement as it was for notifying someone about excessive vibration. This was essentially an energy harvester where the resulting energy profile included the sensed information (as opposed to an energy harvester that powers some other sensor).
There was an element here that we’ll dig into in an upcoming piece: the use of magnets to suppress noise and add non-linearity. Under normal circumstances, the magnetic field gets in the way of the motion of a resonating member. For instance, if you had a metronome with a magnet in the middle at the top, then the lever would balk each time it approached the magnet. Only if it moved hard enough would the lever be able to push past the magnet.
Once a higher level of vibration was detected, the energy harvested would provide the wherewithal to send a message alerting someone that something was up.
- Application areas for these: IoT, structural integrity, large-area sensor arrays.
- TRL 4; needs design optimization and time for the process to mature. Less than 5 years.
- Exemplary papers:
- Liu, et al, Zero Quiescent Power VLF Mechanical Communication Receiver, Transducers 2015, Alaska
- Tang, et al, A Self-Powered Wireless Sensing Node for Event-Driven Alerting Based on a Bi-stable Vibration Energy Harvester, Transducers 2015, Alaska
- Bonus paper: Lin, Yang, Micromechanical Resonant Switches (“Resoswitches”) and Resonant Power Converters, Technical Report No. UCB/EECS-2015-212; http://www.eecs.berkeley.edu/Pubs/TechRpts/2015/EECS-2015-212.html
GaN Resonators
Gallium nitride (GaN) is becoming increasingly popular, since it’s a piezoelectric wide-bandgap material with high-power capabilities. As such, it’s being investigated for use as resonators, especially in combination with high-electron mobility transistors (HEMTs). These latter work because a horizontal boundary between AlGaN and GaN layers allows for a 2D “electron gas” (2DEG) region that conducts electrons extraordinarily easily. This can be used as the sensing element for the resonator.
In one paper, Rais-Zadeh et al from IEEE give a complete overview of GaN as a resonator, including discussion of the 2DEG and its role. Another paper, Wang et al of MIT, explores non-linearities in “Lamb mode” resonators (which would appear to be acoustic vibration modes such as can be seen on an excited Chladni plate with a dusting of salt).
The overall figure of merit here isn’t just the Q value, but is the product of Q and the resonant frequency. The higher the frequency, the better. One project by Ansari et al at Michigan managed a Q of 13,000 at 740 MHz at room temperature and atmospheric pressure, the highest Qxf yet achieved, according to the paper.
They did this by creating a “phonon trap” that concentrated the phonons in the middle of the resonator. Normally, they have to attach this proof mass using narrow “tethers” so that the tethers don’t carry the uniformly-distributed phonons that are at the edge away into the rest of the system. But since, in this work, the phonons stay away from the edge, they can use wide tethers, which perturb the vibration mode shapes less.
- Application areas for these: RF filters, frequency references for transmitters and receivers, and power electronics.
- TRL 3; some processes are mature, but there is no foundry infrastructure in place. 7-10 years.
- Exemplary papers:
- Ansari, A., et al, A HIGH-Q AlGaN/GaNPHONON TRAP WITH INTEGRATED HEMT READ-OUT, Transducers 2015, Alaska
- M. Rais-Zadeh et al, Gallium nitride as an electromechanical material, IEEE Journal of Microelectromechanical Systems, vol. 23, no. 6, pp. 1252–1271, December 2014.
- Wang, S., et al, PIEZOELECTRIC NONLINEARITY IN GAN LAMB MODE RESONATORS, Transducers 2015, Alaska
Graphene FET Gas Sensor
The next topic involves a single paper by Liu et al at Berkeley. The idea here is that a graphene transistor’s behavior – in particular, its Dirac point and mobility – can be affected by materials adsorbing onto the surface. These molecules act as dopants, donating or accepting charges from the graphene. Each of a variety of gases has a distinct ratio between the mobility and the Dirac point, and the team successfully detected NO2 (nitrogen dioxide), NH3 (ammonia), H2O (exercise left to the reader), and CH3OH (methanol). And they can do this with microwatt power levels.
- Application areas for these: Selective gas sensing.
- TRL 3; processes immature, lack of foundry infrastructure. 7-10 years.
- Exemplary paper:
- Liu, Y., Lin, S., Lin, L., A Versatile Gas Sensor with Selectivity Using a Single Graphene Transistor, Transducers 2015, Alaska
Biodegradable sensors and batteries
This next area is obviously about medicine. It’s great to be able to insert increasingly intelligent sensors within people to understand what’s going right and wrong, but it often takes surgery both to insert the sensor and then to remove the sensor when the job is done.
Surgery is always risky, and any time you can eliminate the need for surgery, everyone sleeps a bit easier. So it’s great to have materials that will hang out long enough to be useful and then just fade away into the hereafter with no need to be removed – and no toxins created along the way.
Luo et al from Georgia Tech and Penn created a pressure sensor that ended up having three lifetime phases. Two were obvious: it could operate for 24 hours, and, once detectable functioning ceased, it entered a 25-day degradation phase. But there was also an initial equilibration phase of 1.5 hours whose cause isn’t really known yet. They had to wait this time before they could rely on the output.
One popular biocompatible material is poly-lactic acid (PLA), which we saw back in the bee hive application. But it takes too long to degrade, so they used poly(lactic-co-glycolic acid) to get the 25-day decay.
Meanwhile, She et al, also of Penn and Georgia Tech, created a biodegradable battery. Batteries had been done before, but if they carried all their own electrolyte, they were too big. Prior work had leveraged the gastric juices as electrolyte, but then, as conditions in the body changed, so did the performance or output of the battery. So these guys wanted something that was more constant, more reliable.
They turned to NaCl dispersed in polycaprolactone (PCL). This was activated by the internal fluids, but it kept a much more constant output. The fact that it has to hit the stomach to be activated means you don’t need to seal it as carefully and that shelf life is also improved.
- Application areas for these: medical devices, obviously, but also agricultural applications and environmental monitoring.
- TRL 3; processes immature, although low cost; there’s no infrastructure. 5-7 years for external use; >10 years for in-vivo (i.e., sticking this into real live people).
- Exemplary papers:
- Luo, et al, MICROFABRICATED PLGA/PVA-BASED COMPLETELY BIODEGRADABLE PASSIVE RF PRESSURE SENSORS, Transducers 2015, Alaska
- She, et al, IMMOBILIZED ELECTROLYTE BIODEGRADABLE BATTERIES FOR IMPLANTABLE MEMS, Transducers 2015, Alaska
Flexible Energy Harvesters
It’s easy to imagine the utility of power generation from all of your movements throughout the day. Your clothes in particular move in a variety of ways as you saunter around the office. This has been done before, but there’s more work required to fully characterize materials. For example, Song et al of Sogang University in South Korea explored polyvinylidene difluoride (PVDF). It generates higher voltages with faster frequencies and longer displacements; putting numbers to that general characteristic was the point of the project.
PVDF is applied as a strap, and it becomes ferroelectric after it’s stretched – which seems to be something of an initial activation that’s needed. Of course, more straps means faster charge buildup. They were able to get a 10-µF cap charged to 0.5 V in under 2 seconds.
Meanwhile, Gusarova et al from Grenoble used poly(VDF-TrFE) (that last bit is triflouroethylene). This requires no initial stretching, and they were able to charge up to 10 V.
- Application areas for these: medical devices, obviously, but also agricultural applications and environmental monitoring.
- TRL 3; processes immature, no manufacturing infrastructure. 7-10 years.
- Exemplary papers:
- Song, Ahn, Yun, SCALABLE TEXTILE ENERGY HARVESTER IN WOVEN PIEZOELECTRIC STRUCTURES, Transducers 2015, Alaska
- Gusarova, etal, FLEXIBLE SCREEN-PRINTED PIEZOELECTRIC P(VDF-TRFE) COPOLYMER MICROGENERATORS FOR ENERGY HARVESTING, Transducers 2015, Alaska
Paper sensors
This one clearly piqued Ms. Fitzgerald’s curiosity. Folks have talked about electronics printed onto paper already; doing sensors on paper makes things just that much more awesome.
Of course, the name of the game here is cost, in particular for one-use biochemical assays. Printing on paper lowers to the costs of sensors to levels that would never be possible with silicon or other organic materials. But other advantages include paper’s ability to transport materials through capillary action with no other energy; its ability to store chemicals, due to its porosity; its biocompatibility; its light weight; and its ease of patterning.
Paper sensors have been done before, but they’re all (with one exception – newer glucometers) detected by color change. That’s great, but so many things can affect the perceived color of a given sample. So electronic readout is more precise. For measurements that must be read at a specific time by nurses that may be bouncing around the floor checking on different patients, electrochemiluminescence may be even better.
Channels are created, for instance, by printing hydrophobic materials onto hydrophilic paper, directing the flow of liquids as in a work by Maxwell et al of Harvard and Rutgers. But putting transistors down in a cost-effective manner is still a bit of a trick. And there’s also the consideration of whether the electronics should be on the paper or in an external reader (in which case they never need to touch the analyte, reducing contamination concerns).
Some forms of “amplification” (like DNA) require heating – and it’s even possible to create in-paper heaters. But this stuff is really in early days, and there are numerous materials and ways to do patterning; nothing has yet settled into a direction for commercialization. Liana et al from Australia provide a good overview of paper techniques.
In one twist, Lee et al from SUNY Binghamton used bacterial respiration to create a battery in paper. They folded it up to place a single drop of a bacteria-laden liquid that would diffuse into all the layers. When used, the paper was unfolded, exposing four batteries to more air for greater activity. What’s convenient (and scary?) here is that lots of different bacteria can be used; no matter where you are in the world, there’s probably a suitable bacterium to be exploited.
- Application areas for these: low-cost disposable medical diagnostics, potentially with their own power sources.
- TRL 2; >10 years.
- Exemplary papers:
- Song, Ahn, Yun, SCALABLE TEXTILE ENERGY HARVESTER IN WOVEN PIEZOELECTRIC STRUCTURES, Transducers 2015, Alaska
- Gusarova, et al, FLEXIBLE SCREEN-PRINTED PIEZOELECTRIC P(VDF-TRFE) COPOLYMER MICROGENERATORS FOR ENERGY HARVESTING, Transducers 2015, Alaska
[Updated to add link below.]
More info:
Alissa Fitzgerald’s original MEC presentation



Which of these sensor developments do you find exciting?