New robotic walker helps patients walk with a natural gait
December 2, 2014
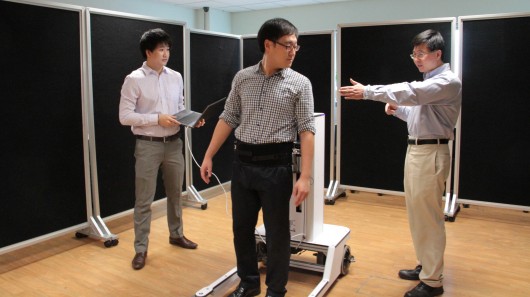
Designed by a team led by Assistant Professor Yu Haoyong, the omni-directional platform supports the patient’s body weight as they walk across the floor, while also providing powered support for movements of their pelvis and trunk. Force sensors detect the direction in which the patient wishes to move, and respond by moving the walker with them in that direction.
It additionally incorporates a network of body-mounted sensors, that … Read More → "New robotic walker helps patients walk with a natural gait"