

One of the groups was from Seoul National University’s BioRobotics Laboratory, led by Professor Kyu-Jin Cho. Researchers there have designed a clever robotic wheel based on one of the most famous origami patterns, the magic ball pattern.
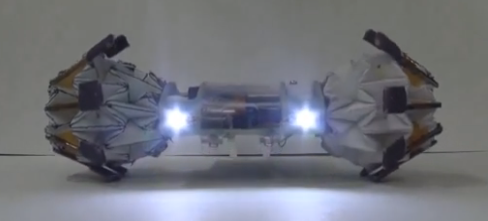
The wheel they created can change its radius by deforming its shape. This is a useful trick to be able to perform, since a wheel with a large radius is better at climbing over things, while a wheel with a smaller radius is better at squeezing under things, as the robot demonstrates:
via IEEE Spectrum

